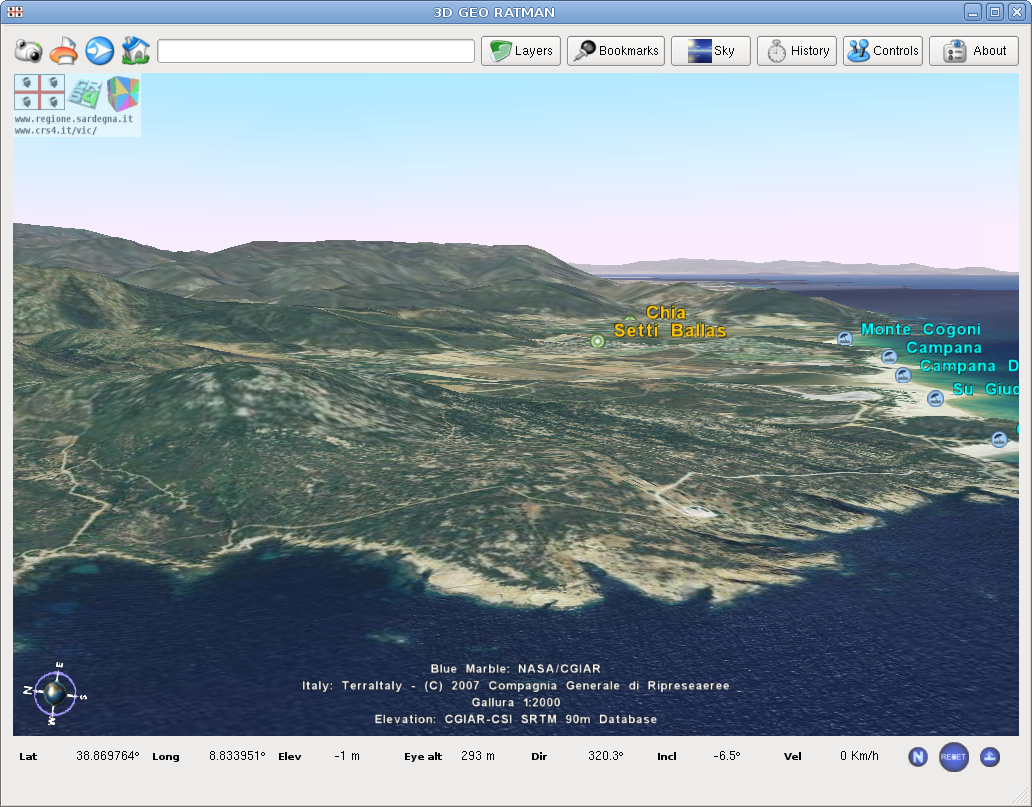
RATMAN (Rapidly Adaptive Terrain Models Available on the Net) is a real-time terrain rendering framework able to asynchronously access terrain information from remote servers. It consists of a high performance portable rendering library used as a rendering engine, and of a simple networked viewer integrated with many different data sources.
![Ratman screen]()
It has been announced and published during the "Xth Meeting of the Italian GRASS and GFOSS users"
You can find more info here.
Waiting for the official trac/wiki you can find some installation tips on the Gfoss.it wiki.
Ciao
Luca
It has been announced and published during the "Xth Meeting of the Italian GRASS and GFOSS users"
You can find more info here.
Waiting for the official trac/wiki you can find some installation tips on the Gfoss.it wiki.
Ciao
Luca